Tinkers Projects
Imagine | Develop | Create
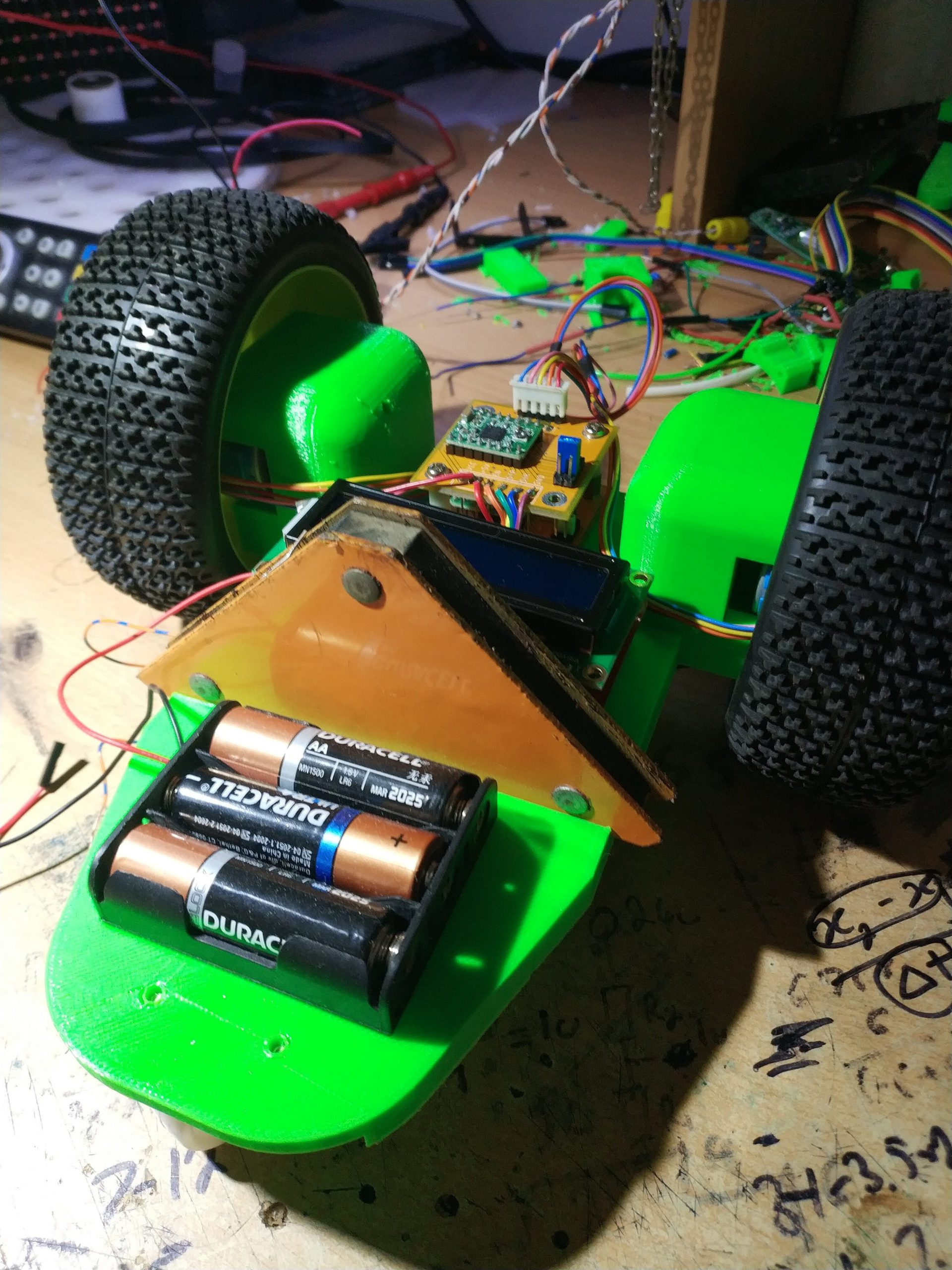




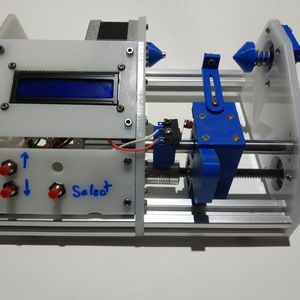
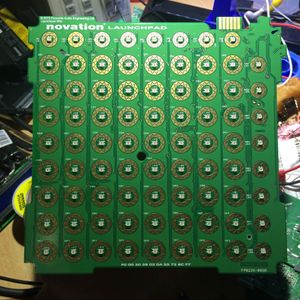
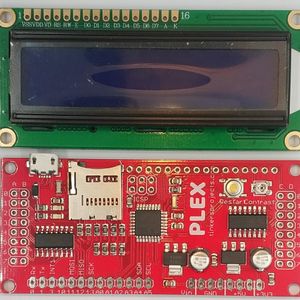
This is the first prototype for a magnetic robotic cleaner. This cleaner will be used to pick up screws and other ferrous steel parts from the ground. Over the years, I have always had a problem with dropping screws on the ground and losing them. This project is to have a robot that picks up these items so the parts can be used in a different project and not thrown out. The robot uses 2 28byj-48 motors to drive the wheels and the PLEX controller The motor controller PCBs uses an A4988 and the 28byj-48 can plug into the board. This board is coming out soon, needs more testing.
This is the first prototype for a magnetic robotic cleaner. This cleaner will be used to pick up screws and other ferrous steel parts from the ground. Over the years, I have always had a problem with dropping screws on the ground and losing them. This project is to have a robot that picks up these items so the parts can be used in a different project and not thrown out. The robot uses 2 28byj-48 motors to drive the wheels and the PLEX controller The motor controller PCBs uses an A4988 and the 28byj-48 can plug into the board. This board is coming out soon, needs more testing.