Tinkers Projects
Imagine | Develop | Create
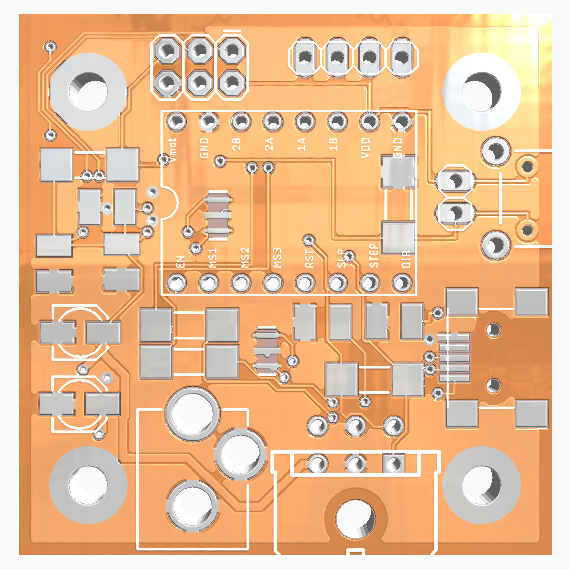


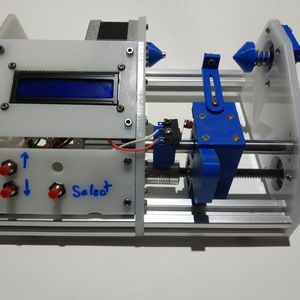
This controller is made as a prototype tool to test mechanics from a stepper motor. On the controller, there is a button which is used to change the state of the motor. The controller can have 2 states set, one while the button is pressed ad one while the button is not pressed. The controller can be set using a serial user interface. There are 4 different states that can be set; stop, move to a position, move amount and continuously moving. Stop is stop to stop the motor. Move to a position is to move to a set position. Move amount is to move a set amount no matter what the other set state is. Continuously moving make the motor continuously move at a set speed in a direction. 2 different or the same state can be set, for example; state 1 (button = 0) is continuously moving and state 2 (button = 1) is Move to a position. This will make the motor continuously run but when the button is pressed, the motor will go to the set position. This means that the motor will return to the same spot even tho it has moved away at a random distance. Another example would be setting the same state but with different speed setting or position settings. To access the menu, plug the controller into the USB and the menu will appear in the serial console. This menu allows you to set how the controller reacts to the button press.
Welcome v1.0 Stepper motor controller Commands: P - Program (ON Type, ON Distance, ON Speed, OFF Type, OFF Distance, OFF Speed) A - Move amount (Distance) T - Move To positon (Distance) S - Set setting (m1, m2, m3) D - Display details H - Help Type: 0 - Stop 1 - Move to position 2 - Move amount 3 - Continuously movingThe Arduino program and PCB is available from https://github.com/tinkersprojects/Stepper-Motor-Prototype-Tester
Code for Project
GNU General Public License v3.0#include <AccelStepper.h>
#include <EEPROM.h>
//Pins
#define Activepin 2
#define Enablepin 3
#define M1pin 4
#define M2pin 5
#define M3pin 6
boolean last_Activepin_state;
boolean M1 = false;
boolean M2 = false;
boolean M3 = false;
byte ActiveType = 2;
long ActiveValue = 200;
double ActiveSpeed = 200;
byte NonActiveType = 2;
long NonActiveValue = 200;
double NonActiveSpeed = 200;
AccelStepper stepper(1,7,8);
void setup()
{
read();
Serial.begin(115200);
Serial.println("Welcome v1.0 Stepper motor controller");
Help();
pinMode(Activepin, OUTPUT);
pinMode(Enablepin, OUTPUT);
digitalWrite(Enablepin,LOW);
setSetting();
stepper.setEnablePin(13);
stepper.setMaxSpeed(200.0);
stepper.setAcceleration(100000.0);
stepper.enableOutputs();
last_Activepin_state = !digitalRead(Activepin);
}
void loop()
{
serialRead();
runmotor();
}
/****************** MOTOR CONTROL ******************/
void runmotor()
{
if(last_Activepin_state != digitalRead(Activepin))
{
if(digitalRead(Activepin) == HIGH)
{
SetMotor(ActiveType, ActiveValue, ActiveSpeed);
}
else
{
SetMotor(NonActiveType, NonActiveValue, NonActiveSpeed);
}
last_Activepin_state = digitalRead(Activepin);
}
runsteps();
}
void SetMotor(byte command, long Value, double Speed)
{
switch(command)
{
case 0: // Stop
stepper.setMaxSpeed(0);
stepper.setSpeed(0);
stepper.move(0);
break;
case 1: // Move to position
stepper.setMaxSpeed(Speed);
stepper.setSpeed(Speed);
stepper.moveTo(Value);
while(!hasFinshedStepping()){runsteps();}
break;
case 2: // Move Amount from current loction
stepper.setMaxSpeed(Speed);
stepper.setSpeed(Speed);
stepper.move(Value);
while(!hasFinshedStepping()){runsteps();}
break;
case 3: // Move constly
stepper.setMaxSpeed(Speed);
stepper.setSpeed(Speed);
stepper.move(Value);
last_Activepin_state = digitalRead(Activepin); // needs to be set again
break;
case 4: // Move to position and can be interupeted
stepper.setMaxSpeed(Speed);
stepper.setSpeed(Speed);
stepper.moveTo(Value);
break;
case 5: // Move Amount from current loction and can be interupeted
stepper.setMaxSpeed(Speed);
stepper.setSpeed(Speed);
stepper.move(Value);
break;
}
}
void setSetting()
{
if(M1)
digitalWrite(M1pin,HIGH);
else
digitalWrite(M1pin,LOW);
if(M2)
digitalWrite(M2pin,HIGH);
else
digitalWrite(M2pin,LOW);
if(M3)
digitalWrite(M3pin,HIGH);
else
digitalWrite(M3pin,LOW);
}
bool hasFinshedStepping()
{
return stepper.distanceToGo()!=0;
}
void runsteps()
{
stepper.run();
}
/****************** COMPUTER INTERFACE ******************/
String inputString = "";
char menu = 0;
char menuStep = 0;
void serialRead()
{
while (Serial.available())
{
char inChar = (char)Serial.read();
if(menu == 0)
{
if(inChar>='a')inChar = inChar - ('a'-'A');
menu = inChar;
menuStep = 0;
while((char)Serial.read() != '\n'){runmotor();}
ReceiveCommand(0);
inputString = "";
return;
}
else
{
if (inChar == '\n')
{
menuStep++;
ReceiveCommand(inputString.toDouble());
inputString = "";
return;
}
else
{
inputString += inChar;
}
}
}
}
void ReceiveCommand(double Value)
{
switch(menu)
{
case 'H':
Help();
break;
case 'P':
Program(Value);
break;
case 'A':
MoveAmount(Value);
break;
case 'T':
MoveTo(Value);
break;
case 'S':
Setting(Value);
break;
case 'D':
Display();
break;
}
}
void Program(double Value)
{
if((menuStep == 2 && Value == 3) || (menuStep == 5 && Value == 3)) menuStep++;
switch(menuStep)
{
case 1:
Serial.print("Enter ON Type:");
break;
case 2:
ActiveType = Value;
Serial.println(Value);
Serial.print("Enter ON Distance:");
break;
case 3:
ActiveValue = Value;
Serial.println(Value);
Serial.print("Enter ON Speed:");
break;
case 4:
ActiveSpeed = Value;
Serial.println(Value);
Serial.print("Enter OFF Type:");
break;
case 5:
NonActiveType = Value;
Serial.println(Value);
Serial.print("Enter OFF Distance:");
break;
case 6:
NonActiveValue = Value;
Serial.println(Value);
Serial.print("Enter OFF Speed:");
break;
case 7:
NonActiveSpeed = Value;
menu = 0;
Serial.println(Value);
Serial.println("Save");
save();
break;
}
}
void MoveAmount(double Value)
{
stepper.move(Value);
menu = 0;
}
void MoveTo(double Value)
{
stepper.moveTo(Value);
menu = 0;
}
void Setting(double Value)
{
switch(menuStep)
{
case 1:
Serial.print("Enter M1:");
break;
case 2:
if(Value >0)
M1 = true;
else
M1 = false;
Serial.println(M1);
Serial.print("Enter M2:");
break;
case 3:
if(Value >0)
M2 = true;
else
M2 = false;
Serial.println(M2);
Serial.print("Enter M3:");
break;
case 4:
if(Value >0)
M3 = true;
else
M3 = false;
menu = 0;
Serial.println(M3);
Serial.println("Save");
save();
setSetting();
break;
}
}
void Help()
{
menu = 0;
Serial.println("Commads:");
Serial.println("\tP - Program (ON Type, ON Distance, ON Speed, OFF Type, OFF Distance, OFF Speed)");
Serial.println("\tA - Move amount (Distance)");
Serial.println("\tT - Move To positon (Distance)");
Serial.println("\tS - Set setting (m1, m2, m3)");
Serial.println("\tD - Display details");
Serial.println("\tH - Help");
Serial.println();
Serial.println("Type:");
Serial.println("\t0 - Stop");
Serial.println("\t1 - Move to position");
Serial.println("\t2 - Move amount");
Serial.println("\t3 - Continuously moving");
}
void Display()
{
menu = 0;
Serial.println("ON:");
Serial.print("\tType: ");
Serial.println(ActiveType);
Serial.print("\tDistance: ");
Serial.println(ActiveValue);
Serial.print("\tSpeed:");
Serial.println(ActiveSpeed);
Serial.println();
Serial.println("OFF:");
Serial.print("\tType: ");
Serial.println(NonActiveType);
Serial.print("\tDistance: ");
Serial.println(NonActiveValue);
Serial.print("\tSpeed: ");
Serial.println(NonActiveSpeed);
Serial.println();
Serial.println("Settings:");
Serial.print("\tM1: ");
Serial.println(M1);
Serial.print("\tM2: ");
Serial.println(M2);
Serial.print("\tM3: ");
Serial.println(M3);
Serial.println();
}
/****************** STORAGE ******************/
void read()
{
if(EEPROM.read(0) == 1)
{
M1 = EEPROM.read(1);
M2 = EEPROM.read(2);
M3 = EEPROM.read(3);
String readString = "";
char letter = 0;
for(int i = 20;i<2000;i++)
{
char CHAR = EEPROM.read(i);
if(CHAR >= 'A' && CHAR < 'Z' && letter != 0)
{
switch(letter)
{
case 'A':
ActiveType = readString.toInt();
break;
case 'B':
ActiveValue = readString.toInt();
break;
case 'C':
ActiveSpeed = readString.toDouble();
break;
case 'D':
NonActiveType = readString.toInt();
break;
case 'E':
NonActiveValue = readString.toInt();
break;
case 'F':
NonActiveSpeed = readString.toDouble();
break;
case 'G':
return;
break;
}
}
if(CHAR >= 'A' && CHAR < 'Z')
{
letter = CHAR;
readString = "";
}
else
{
readString += CHAR;
}
}
}
else
{
save();
}
}
void save()
{
EEPROM.write(0, 1);
EEPROM.write(1, M1);
EEPROM.write(2, M2);
EEPROM.write(3, M3);
String saveString = "A"+String(ActiveType);
saveString += "B"+String(ActiveValue);
saveString += "C"+String(ActiveSpeed);
saveString += "D"+String(NonActiveType);
saveString += "E"+String(NonActiveValue);
saveString += "F"+String(NonActiveSpeed);
saveString += "G";
for(int i = 0;i<saveString.length();i++)
{
EEPROM.write(20+i, saveString.charAt(i));
}
}This controller is made as a prototype tool to test mechanics from a stepper motor. On the controller, there is a button which is used to change the state of the motor. The controller can have 2 states set, one while the button is pressed ad one while the button is not pressed. The controller can be set using a serial user interface. There are 4 different states that can be set; stop, move to a position, move amount and continuously moving. Stop is stop to stop the motor. Move to a position is to move to a set position. Move amount is to move a set amount no matter what the other set state is. Continuously moving make the motor continuously move at a set speed in a direction. 2 different or the same state can be set, for example; state 1 (button = 0) is continuously moving and state 2 (button = 1) is Move to a position. This will make the motor continuously run but when the button is pressed, the motor will go to the set position. This means that the motor will return to the same spot even tho it has moved away at a random distance. Another example would be setting the same state but with different speed setting or position settings. To access the menu, plug the controller into the USB and the menu will appear in the serial console. This menu allows you to set how the controller reacts to the button press.
Welcome v1.0 Stepper motor controller Commands: P - Program (ON Type, ON Distance, ON Speed, OFF Type, OFF Distance, OFF Speed) A - Move amount (Distance) T - Move To positon (Distance) S - Set setting (m1, m2, m3) D - Display details H - Help Type: 0 - Stop 1 - Move to position 2 - Move amount 3 - Continuously movingThe Arduino program and PCB is available from https://github.com/tinkersprojects/Stepper-Motor-Prototype-Tester