Tinkers Projects
Imagine | Develop | Create
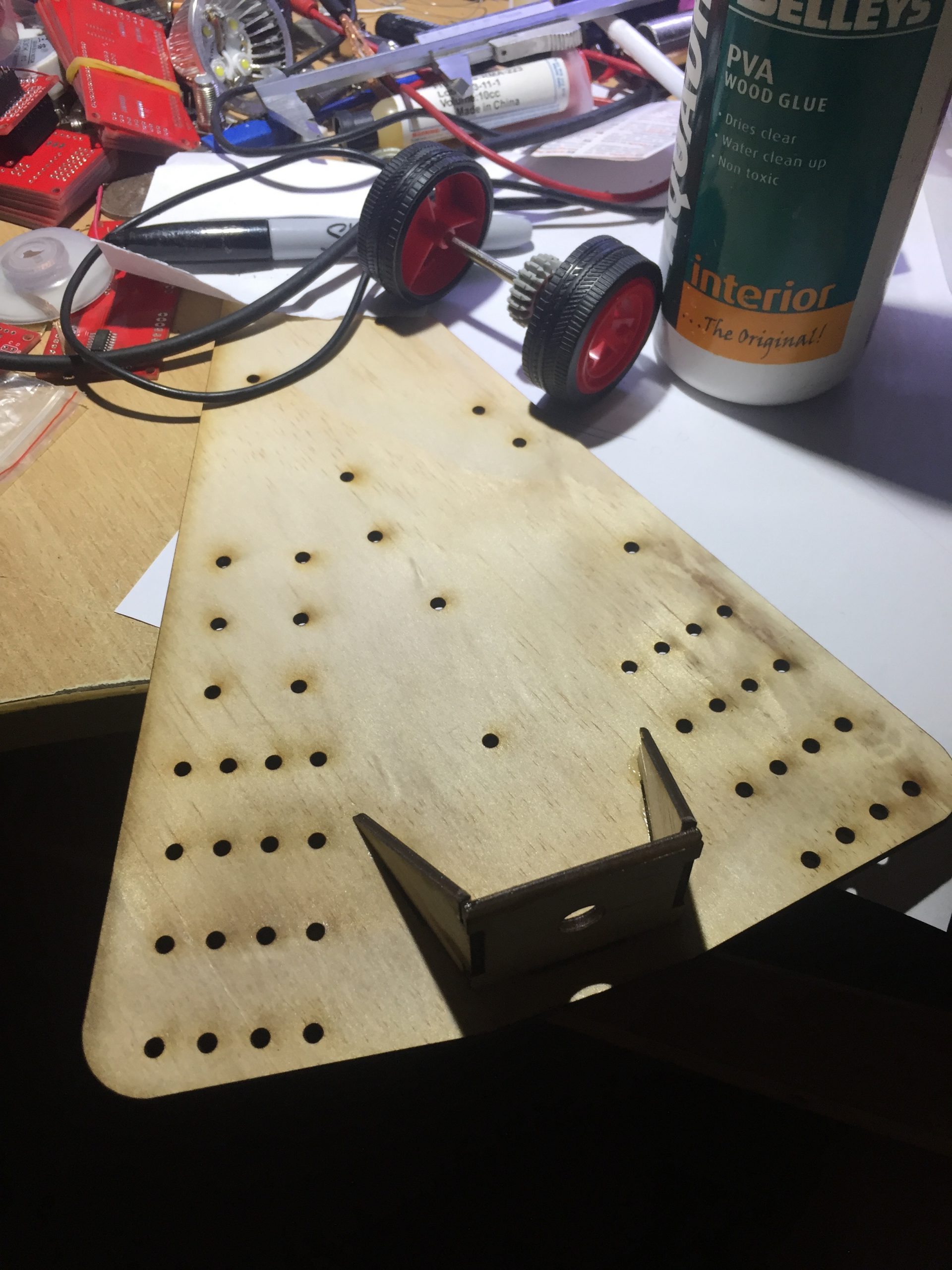




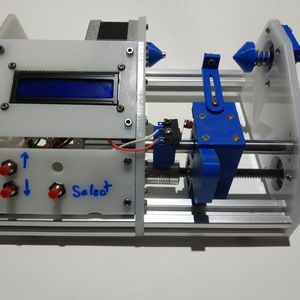
The hardware this year was given and did not have to create our own but it was impractical for me to keep asking for the robot. From this, I asked if I could make my own and was advised that it may take too much time but I think working from home may be more beneficial for testing and working with the Arduino platform will make it easier to program. The design of the robot is based off the robot that is given in the lab but with some differences. My robot has been laser cut from ply wood making it like and strong with 3D printed parts to house motors, bearing and axils. I have borrowed some parts from Lego to move the robot. Between the wheels is a potentiometer to sense the angle of the inverted pendulum and is mounted with plywood slotted and glued in place. The parts can be found at https://www.thingiverse.com/thing:2246411.
The hardware this year was given and did not have to create our own but it was impractical for me to keep asking for the robot. From this, I asked if I could make my own and was advised that it may take too much time but I think working from home may be more beneficial for testing and working with the Arduino platform will make it easier to program. The design of the robot is based off the robot that is given in the lab but with some differences. My robot has been laser cut from ply wood making it like and strong with 3D printed parts to house motors, bearing and axils. I have borrowed some parts from Lego to move the robot. Between the wheels is a potentiometer to sense the angle of the inverted pendulum and is mounted with plywood slotted and glued in place. The parts can be found at https://www.thingiverse.com/thing:2246411.